EndoPerfect: A Hybrid NeRF-Stereo Vision Approach Pioneering Monocular Depth Estimation and 3D Reconstruction in Endoscopy
 Paper
Paper
 Code
Code  Dataset
Dataset
Abstract
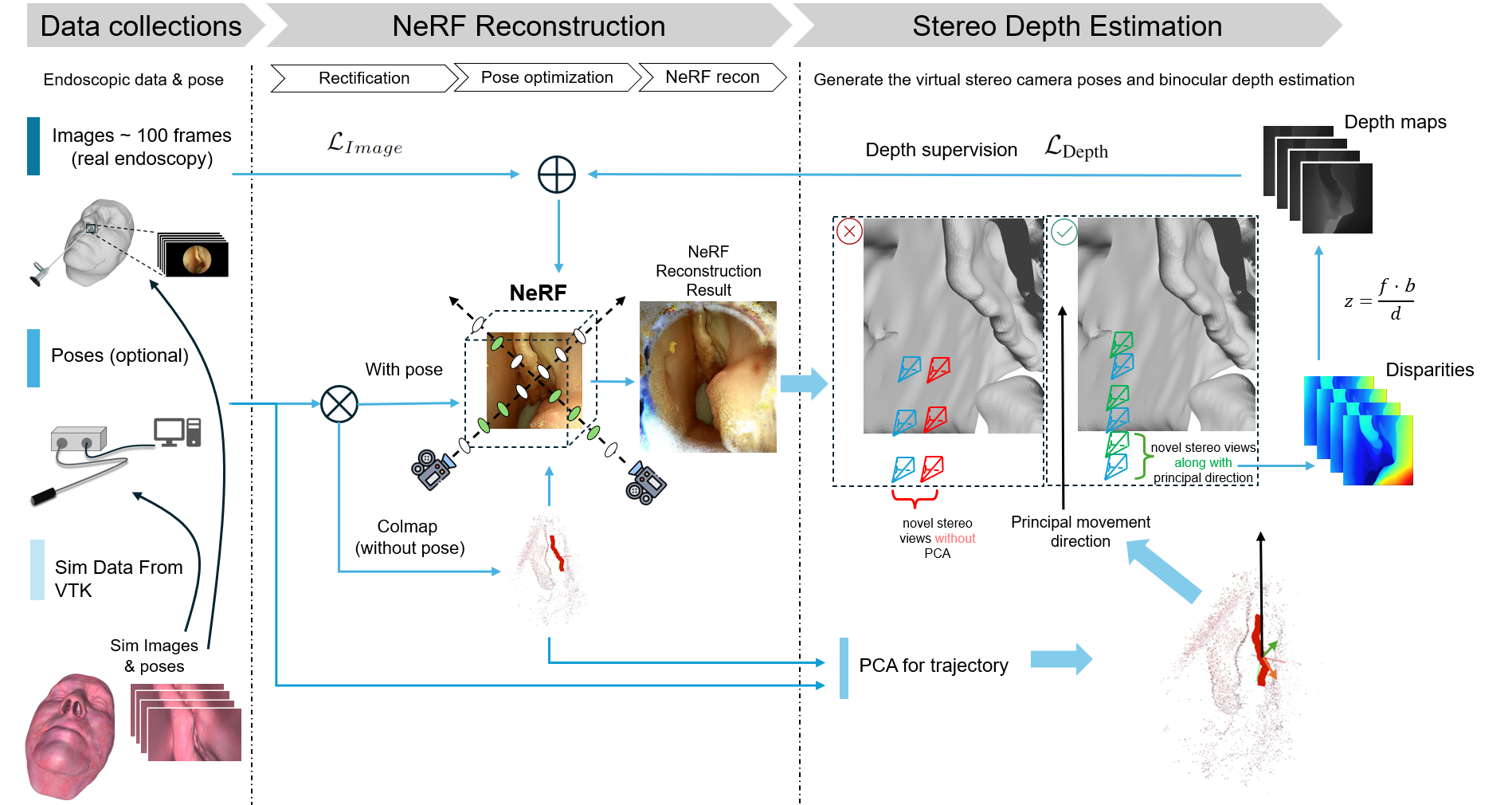
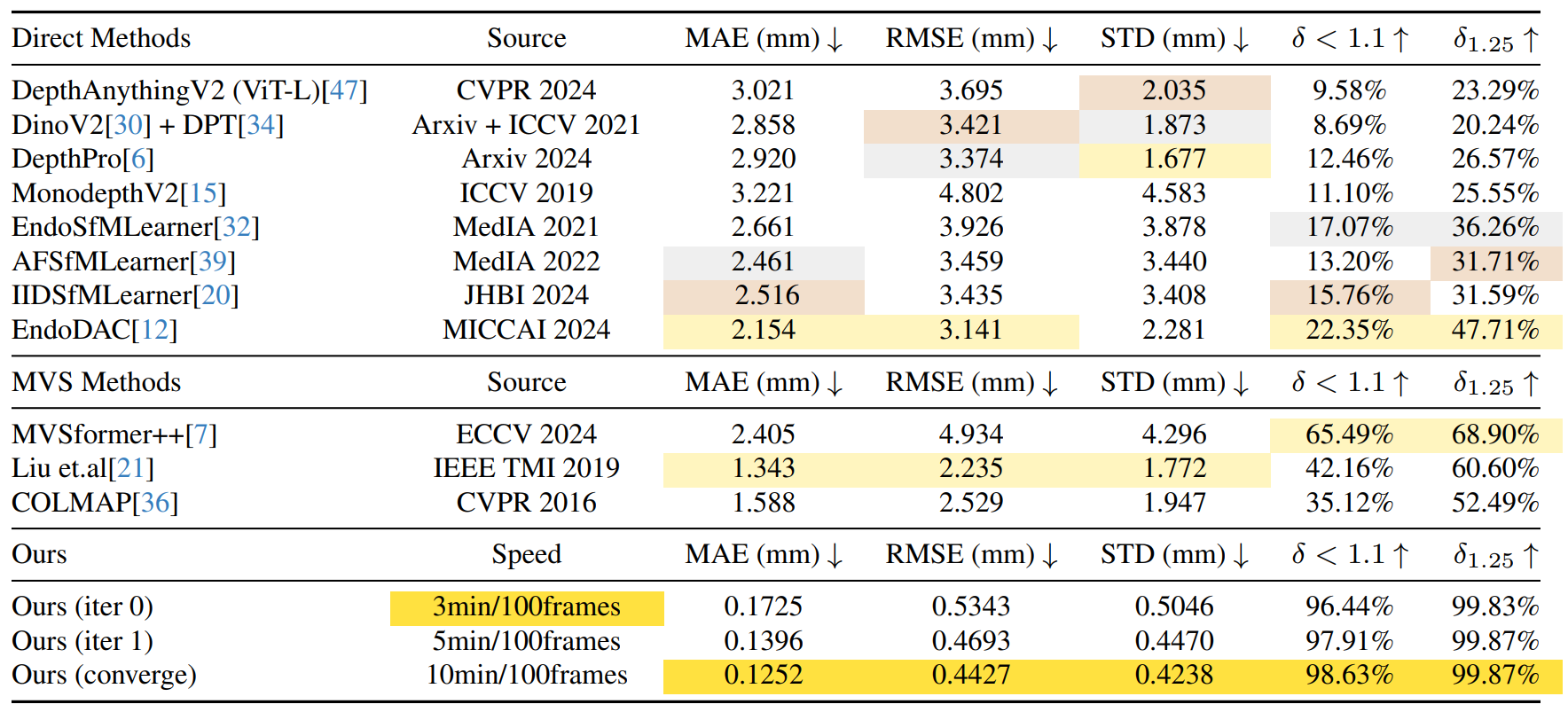
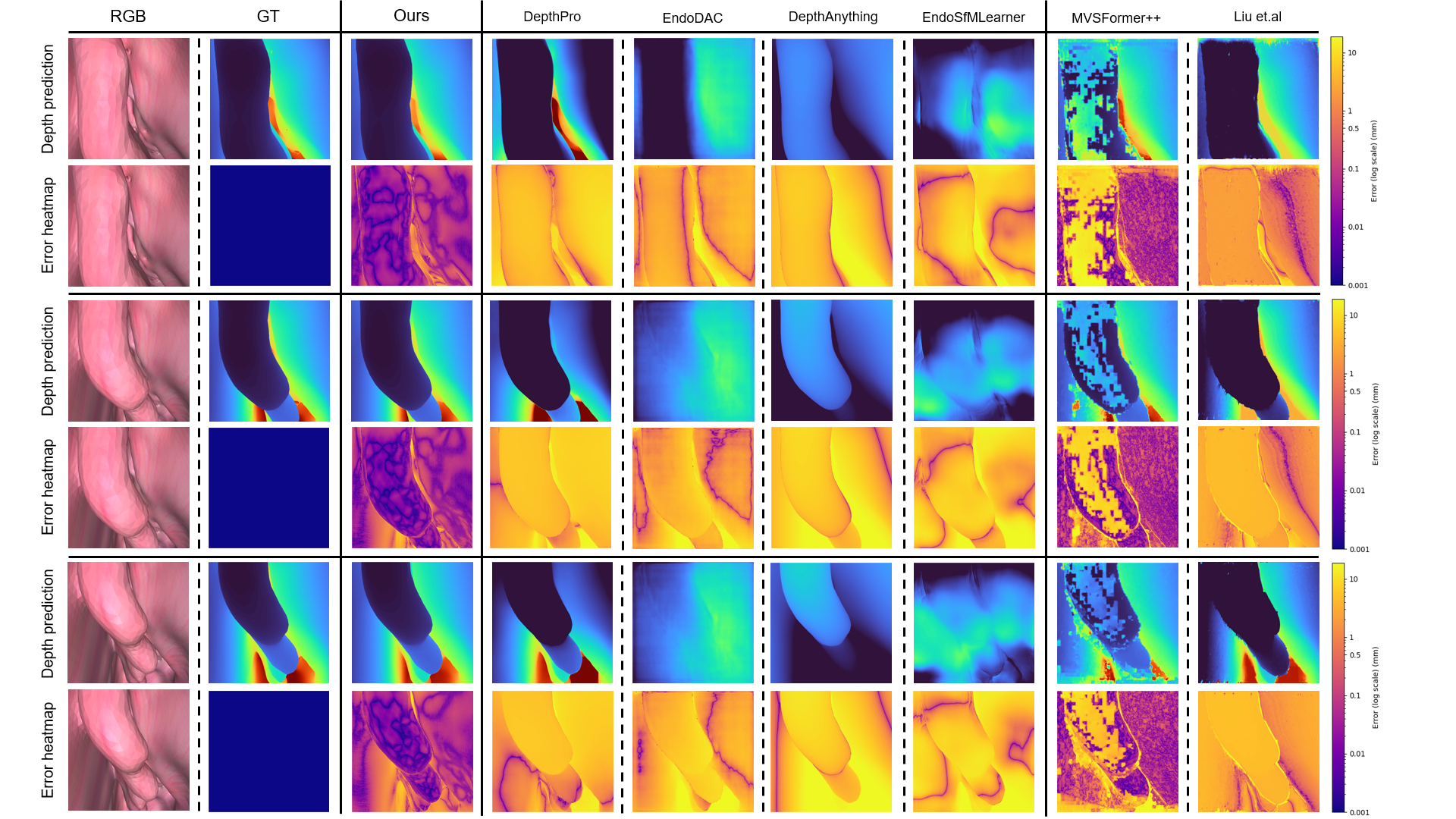
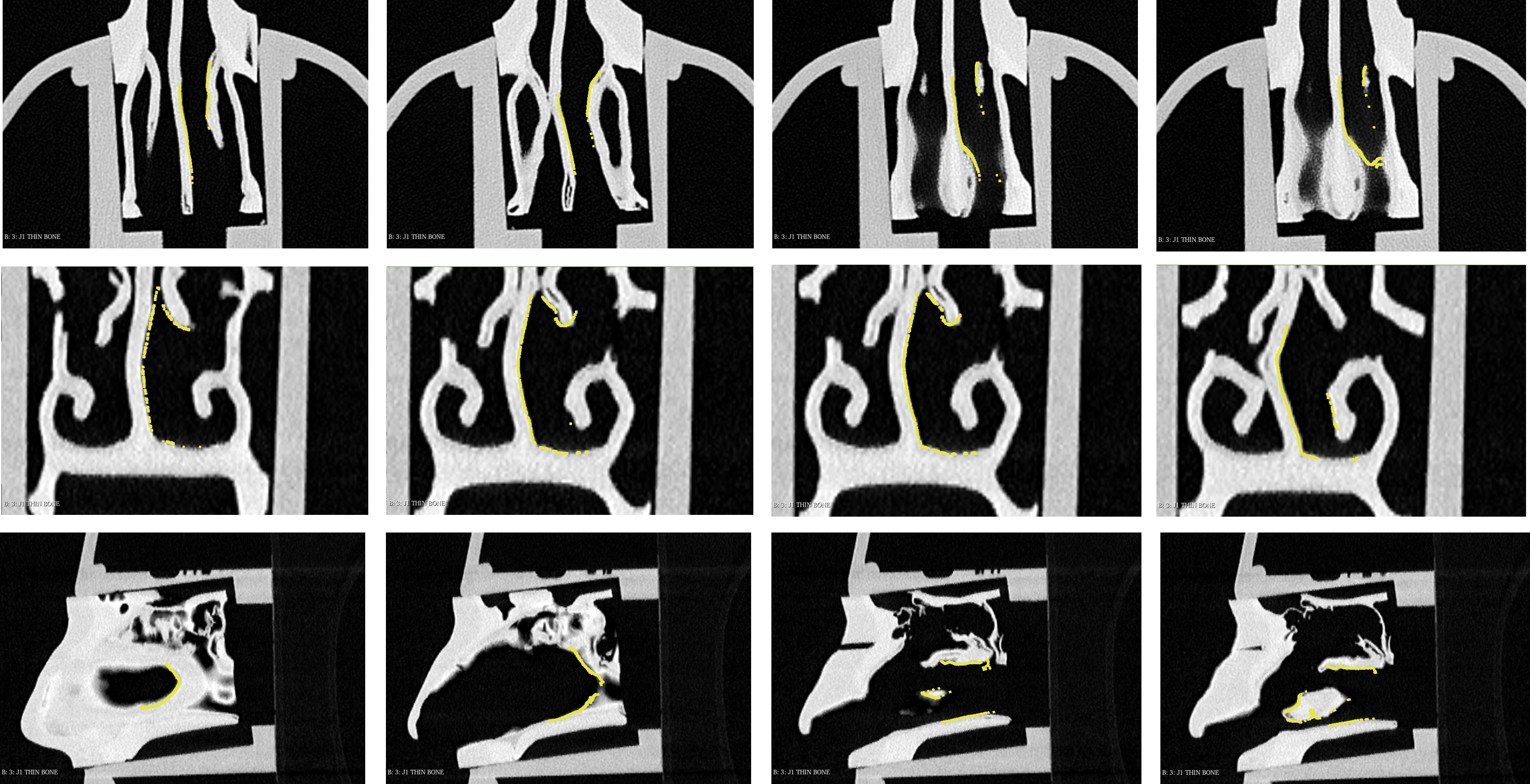
3D reconstruction in endoscopic sinus surgery (ESS) demands exceptional accuracy, with the mean error and standard deviation necessitating within the range of a single CT slice (0.625 mm), as the critical structures in the nasal cavity are situated within submillimeter distances from surgical instruments. This poses a formidable challenge when using conventional monocular endoscopes. Depth estimation is crucial for 3D reconstruction, yet existing depth estimation methodologies either suffer from inherent accuracy limitations or, in the case of learning-based approaches, perform poorly when applied to ESS despite succeeding on their original datasets. In this study, we present a novel, highly generalizable method that combines Neural Radiance Fields (NeRF) and stereo depth estimation for 3D reconstruction that can derive metric monocular depth. Our approach begins with an initial NeRF reconstruction yielding a coarse 3D scene, the subsequent creation of binocular pairs within coarse 3D scene, and generation of depth maps through stereo vision, These depth maps are used to supervise subsequent NeRF iteration, progressively refining NeRF and binocular depth, the refinement process continues until the depth maps converged. This recursive process generates high-accuracy depth maps from monocular endoscopic video. Evaluation in synthetic endoscopy shows a depth accuracy of 0.125 ± 0.443 mm, well within the 0.625 mm threshold. Further clinical experiments with real endoscopic data demonstrate a mean distance to CT mesh of 0.269 mm, representing the highest accuracy among monocular 3D reconstruction methods in ESS.
Videos
Comparison
Case Demo

This case demonstrates the application of EndoPerfect using phantom data, showing how our approach achieves accurate 3D reconstruction in controlled conditions. The results showcase the system's ability to maintain sub-millimeter accuracy while reconstructing complex anatomical structures in a phantom model.
Citation
@article{chen2024hybrid,
title={Hybrid NeRF-Stereo Vision: Pioneering Depth Estimation and 3D Reconstruction in Endoscopy},
author={Chen, Pengcheng and Li, Wenhao and Gunderson, Nicole and Ruthberg, Jeremy and Bly, Randall and Abuzeid, Waleed M and Sun, Zhenglong and Seibel, Eric J},
journal={arXiv preprint arXiv:2410.04041},
year={2024}
}